RGV系统调度控制怎么做?实现高效稳定运行的关键解析
一、为什么RGV系统“跑得快却不一定跑得好”?
在很多自动化项目中,企业选择RGV(轨道搬运车)往往是看中其速度快、承载大、稳定性高。
但实际运行后却出现问题:
多车运行频繁“堵车”
调度混乱,任务响应慢
设备空跑率高,效率不升反降
高峰期系统卡顿甚至停滞
本质原因并不在RGV本身,而在于:
轨道调度控制系统设计不合理
二、核心概念解释:RGV调度控制到底是什么?
RGV系统 ≠ 单台设备运行,而是一个完整系统:
1、RGV系统核心组成
RGV本体(单车执行)
轨道系统(固定路径)
调度系统(大脑)
通信系统(信息传输)
2、什么是“调度控制”?
简单理解就是:
什么时候、哪台车、走哪条轨道、执行哪个任务
本质是一个“多车协同 + 路径分配 + 优先级控制”的系统工程。
三、关键技术解析:如何实现高效稳定调度(重点)
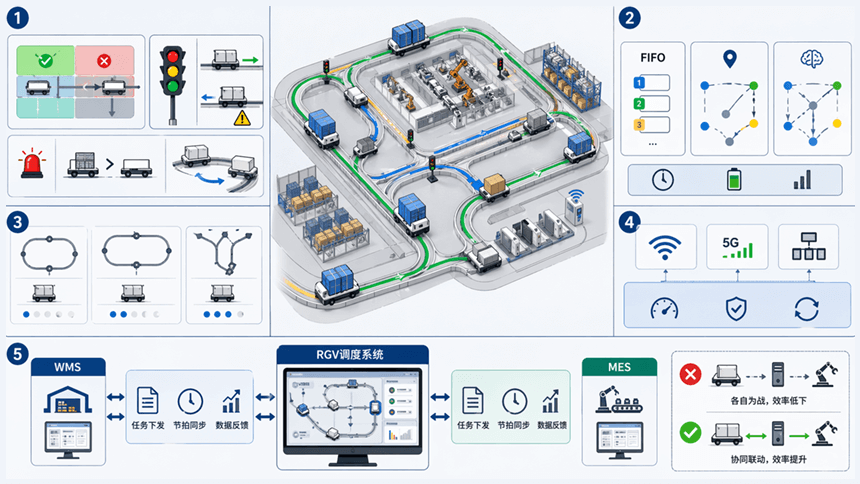
1、多车避让与防碰撞机制
在多RGV运行场景中,必须解决“冲突问题”:
核心策略:
区域划分(Block Control)
将轨道划分为多个区段
同一时间仅允许一台车进入
信号互锁机制
类似“铁路信号灯”
防止误入冲突区域
动态优先级控制
紧急任务优先
空车避让重载车
应用场景:
汽车总装车间、重载物流输送线
2、任务调度算法(效率核心)
调度系统决定整体效率,常见策略:
(1)FIFO(先进先出)
简单可靠
适用于低复杂场景
(2)最短路径优先
提高运输效率
适用于多站点系统
(3)动态调度(推荐)
实时计算最优路径
结合任务优先级、车况、拥堵情况
高端系统通常采用:
规则算法 + AI优化调度(如路径预测)
3、轨道拓扑设计(决定上限)
调度效率的“天花板”,取决于轨道设计:
单环线(Loop)
简单稳定
易出现拥堵
双环/多环
提高吞吐能力
适合大规模系统
分支+汇流结构
支持多工位协同
调度复杂度高
结论:
轨道结构决定调度难度与效率上限
4、通信与控制系统(稳定性关键)
常见通信方式:
工业Wi-Fi
5G专网
PLC有线通信
关键点:
低延迟(避免调度滞后)
高可靠(避免掉线停机)
实时反馈(位置/状态同步)
5、与WMS/MES系统协同(系统级优化)
RGV调度系统必须对接上层系统:
WMS(仓储管理)
MES(生产执行)
实现:
自动任务下发
生产节拍同步
数据闭环
否则会出现:设备很先进,但系统“各自为战”
四、不同调度方案对比(关键决策参考)
1、集中式调度 vs 分布式调度
| 类型 | 特点 | 优点 | 缺点 | 场景 |
|---|---|---|---|---|
| 集中式 | 统一控制 | 易管理 | 单点风险 | 中小系统 |
| 分布式 | 本地决策 | 高灵活 | 实现复杂 | 大规模系统 |
2、固定调度 vs 动态调度
| 类型 | 优点 | 缺点 | 场景 |
|---|---|---|---|
| 固定调度 | 稳定 | 效率低 | 简单产线 |
| 动态调度 | 高效 | 开发复杂 | 智能工厂 |
五、选型建议(最关键部分)
1、根据项目规模选调度方案
小规模(≤5台)
✔ 简单调度 + 单环线中规模(5~20台)
✔ 动态调度 + 分区控制大规模(20+台)
✔ 分布式调度 + 多环结构
2、根据行业特点选择
汽车/重工行业
✔ 高安全 + 冗余调度电商仓储
✔ 高吞吐 + 多任务调度锂电/电子行业
✔ 高精度 + 节拍同步
3、关注3个核心指标
系统吞吐能力(单小时运输量)
调度响应时间
设备利用率
不要只看“速度”,要看“整体效率”
4、提前规划扩展能力
是否支持新增轨道
是否支持增加车辆
调度系统是否可升级
很多项目失败在“扩展性不足”
六、常见误区与注意事项
❌ 误区1:RGV比AGV更简单,不需要复杂调度
实际:
多车RGV系统调度复杂度更高(轨道限制更强)
❌ 误区2:轨道设计可以后期优化
实际:
轨道结构一旦建成,调整成本极高
❌ 误区3:只关注单车性能
真正决定效率的是:
调度算法
系统协同能力
❌ 误区4:通信系统可忽略
实际:
通信延迟 = 调度失效
七、总结:高效稳定的核心是“系统化设计”
RGV系统要实现高效稳定运行,必须做到:
轨道设计合理(基础)
调度算法先进(核心)
通信系统稳定(保障)
系统协同完善(提升)
本质不是设备问题,而是“系统工程能力”
八、引导咨询(促进转化)
如果您正在规划RGV项目,但面临以下问题:
多车调度如何避免拥堵?
如何设计高吞吐轨道系统?
如何与WMS/MES系统打通?
我们可以为您提供:
✔ RGV系统调度方案设计
✔ 轨道布局优化仿真
✔ 多车调度算法定制
✔ 整体自动化解决方案
提供您的产线/仓库信息,即可获取专属优化方案,避免项目走弯路