AGV导航方式怎么选?激光、二维码与SLAM对比解析
一、AGV导航选错,项目直接“踩坑”
在实际项目中,很多企业在导入AGV(自动导引车)时,最常见的困惑就是:
“激光导航是不是最先进?”
“二维码导航是不是最便宜?”
“SLAM是不是可以不用改造现场?”
但现实是——
导航方式选错,轻则效率低、频繁停机,重则项目失败、设备闲置。
例如:
在重型制造车间使用SLAM,结果定位漂移严重
在柔性产线使用二维码,导致改线成本极高
在高反光环境用激光,频繁丢失定位
本质问题:没有根据场景匹配导航方式
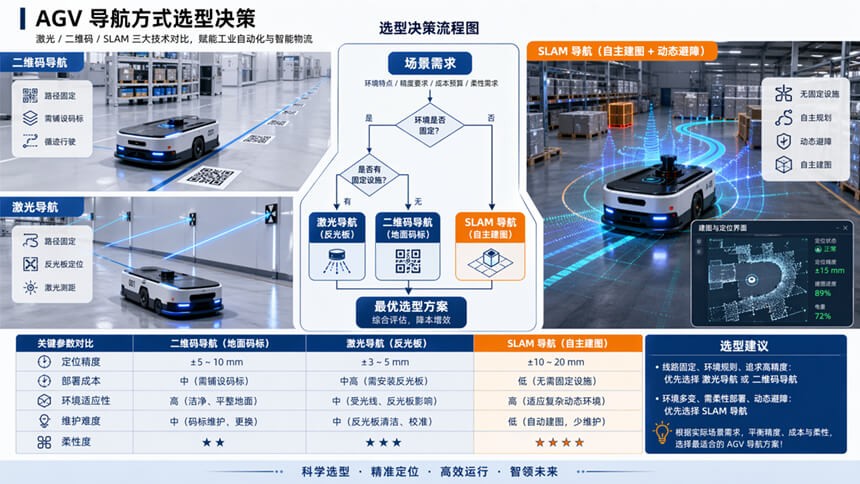
二、核心概念解释:三种主流导航方式是什么?
1、激光导航(Laser Navigation)
通过激光雷达扫描环境中的反光板,实现高精度定位。
类似:人在房间里通过“标志物”判断位置
2、二维码导航(QR Code)
在地面铺设二维码,AGV通过视觉识别二维码确定位置和路径。
类似:沿着地上的“导航点”走
3、SLAM导航(自然导航)
通过激光雷达或视觉传感器,实时构建地图并定位(无需人工标识)。
类似:人靠“记忆+环境感知”找路
三、关键技术解析:核心差异在哪?
1、定位方式差异
| 导航方式 | 定位依赖 | 是否需改造现场 |
|---|---|---|
| 激光导航 | 反光板 | 是(安装反光板) |
| 二维码导航 | 地面二维码 | 是(铺设二维码) |
| SLAM导航 | 环境特征 | 否(基本无需) |
2、调度系统配合能力(关键点)
导航方式不仅是“走路”,还直接影响调度系统(WCS/WMS/MES对接)的表现:
激光导航:
✔ 路径稳定,适合复杂调度系统二维码导航:
✔ 路径固定,调度逻辑简单可靠SLAM导航:
✔ 灵活性高,但对调度算法要求高
结论:导航方式 ≠ 单点技术,而是系统能力的一部分
四、三种导航方式优缺点对比(重点)
1、激光导航
优点:
精度高(±5mm级)
路径灵活,可动态调整
适合复杂产线
缺点:
初期需安装反光板
成本较高
对环境要求较高(灰尘/反光)
典型场景:
汽车制造
重工生产线
2、二维码导航
优点:
成本低
稳定性极高
调试简单
缺点:
路径不可灵活调整
地面施工成本高
不适合频繁改线
典型场景:
电商仓库
标准化流水线
3C电子工厂
3、SLAM导航(激光SLAM/视觉SLAM)
优点:
无需改造环境
部署速度快
柔性极高
缺点:
精度略低(±10~20mm)
对环境变化敏感
算法与调度要求高
典型场景:
改造型工厂
医疗/服务机器人
临时仓储/租赁场地
五、选型建议(核心价值)
1、看“是否需要柔性”
高柔性(频繁改线) → 选 SLAM
中等柔性 → 选 激光导航
固定路线 → 选 二维码
2、看“现场环境”
灰尘大 / 强光 / 反光 → 避免激光
地面无法施工 → 避免二维码
环境变化大 → 谨慎使用SLAM
3、看“预算与ROI”
| 预算水平 | 推荐方案 |
|---|---|
| 低预算 | 二维码导航 |
| 中预算 | 激光导航 |
| 高柔性需求 | SLAM |
4、看“系统复杂度”
简单搬运 → 二维码
多车调度 → 激光导航
智能柔性工厂 → SLAM + 高级调度系统
六、常见误区(很多客户都会踩)
❌ 误区1:SLAM就是最先进
实际:适合≠先进,很多工业场景仍以激光为主
❌ 误区2:二维码很落后
实际:在标准化产线中,二维码是“最稳定方案”
❌ 误区3:导航方式可以后期随便换
实际:
导航方式 = 地面改造 + 调度系统 + 设备结构
更换成本极高
❌ 误区4:只关注单台AGV性能
实际关键在:
调度系统能力
系统协同(WMS/MES)
路径规划策略
七、总结:没有“最好”,只有“最合适”
AGV导航方式的选择,本质是三者的平衡:
成本
柔性
稳定性
最优解 = 结合行业 + 场景 + 系统能力综合设计
八、引导咨询(转化)
如果您正在规划AGV项目,但不确定该选择哪种导航方式,可以提供以下信息:
工厂/仓库平面图
搬运流程与节拍
载重需求
是否需要对接WMS/MES
我们可以为您提供:
✔ 免费导航方式选型评估
✔ 现场适配方案设计
✔ 整体AGV调度系统规划
避免选型错误,从源头降低自动化投入风险